Штош, спустя 8 лет - хотелка построить некоторое робо-шасси таки свершилась: в конце 2020 года я собрал себе робота.
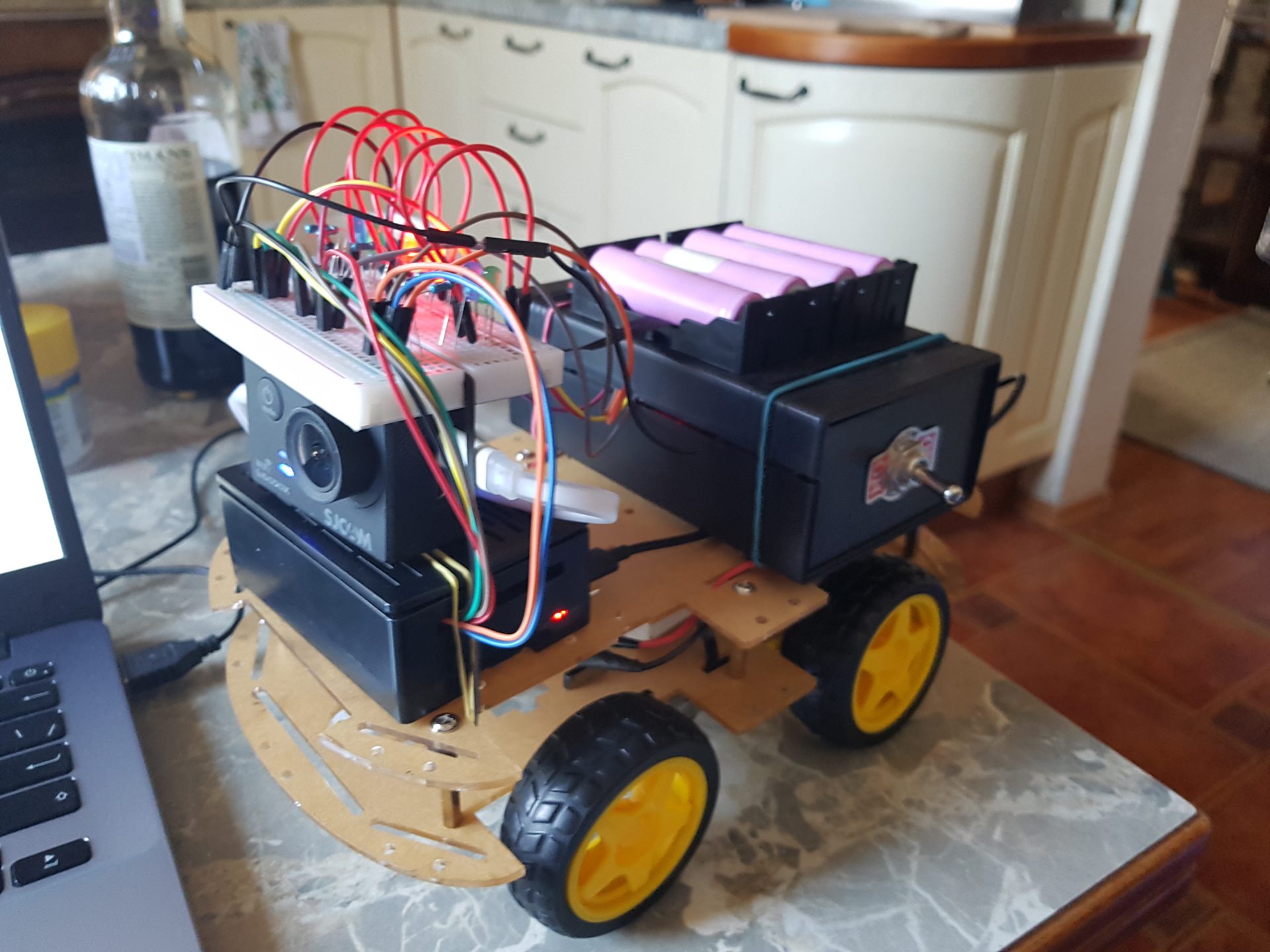
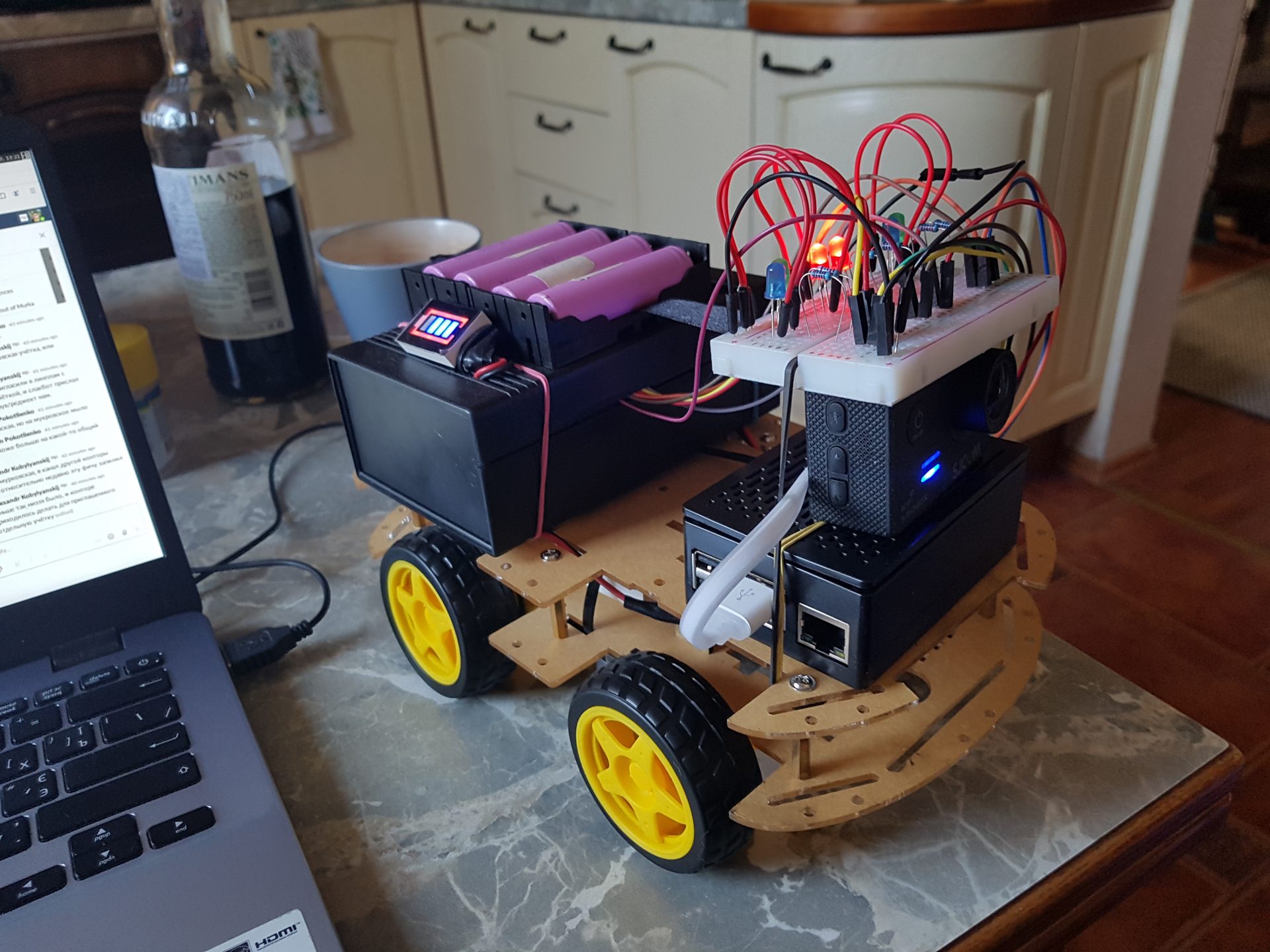
И не на старой материнке x86, а на RaspberryPi.
И без кастомного шасси, а на китайском шасси из оргстекла и движочками.
Технологии стали доступней, ну и появились ресурсы для их покупки :-)
Зайчатки роботостроения 8-летней давности храню тут, для усугубления приступов ностальгии (перенёс со старого адреса gromozeka.pp.ua): http://robot.timba.name
Управление через ssh, при помощи скриптика на петоне, камера - старенький SJCAM 5000X Elite (сначала пробовал с дешманской веб-камерой от logitech, но китайская гопрошка оказалась лучке как в качестве картинки, так и в угле обзора).
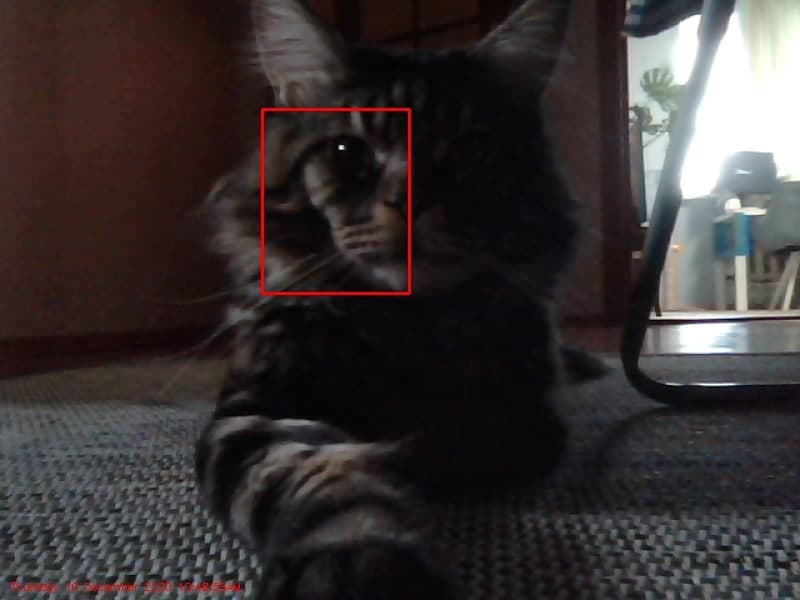
Роботу-ебоботу нашлось применения в хозяйстве: на зиму мы закрываем дверь в прихожую, пушо там стоит газовый котёл и для его работы нужна вентиляция, а из-за вентиляции, при открытой двери - холодно.
Но кот не приемлет закрытые двери и шкрябает её.
Собсно когда сидишь и работаешь - отходить на каждое шкрябанье времени нет, и гораздо проще оказалось гонять кота роботом, зайдя в консольку, висящую на отдельном рабочем столе, и ждущую команд.
Из хотелок - было бы прикольно поиграться с OpenCV (например чтобы робот распознавал кота и сам отгонял его от двери), и пересесть на взрослое шасси (пушо китайское из оргстекла - слишком нэжное, и от него то и дело отламываются кусочки), например на такое: Dagu Wild Thumper 6WD All-Terrain Chassis