Диайвайный НРК это канеш хорошо, но он только ползать умеет.
А мне всегда хотелось попробовать ощутить себя птицей, полетать.
Теперь могу, хехе :-)
Ваще сейчас летать низзя, но если поглубже куда-то забуриться, то можно :-D







У самурая нет цели, только путь
Диайвайный НРК это канеш хорошо, но он только ползать умеет.
А мне всегда хотелось попробовать ощутить себя птицей, полетать.
Теперь могу, хехе :-)
Ваще сейчас летать низзя, но если поглубже куда-то забуриться, то можно :-D
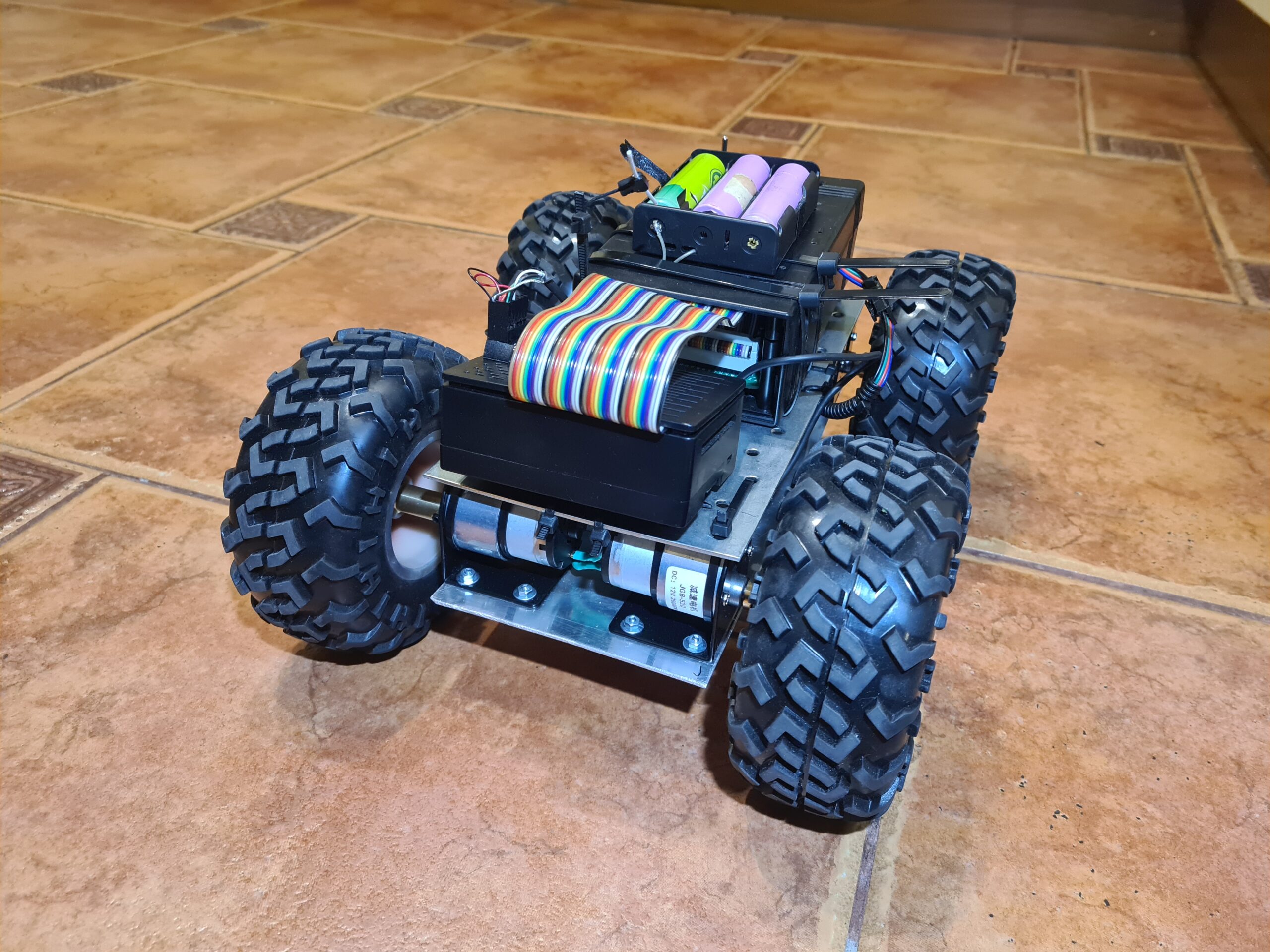
Задел под модульность пригодился: купил камеру и VTX, немношк порисовал в солиде, немношк попечатал на принторе - и теперь это полноценный колёсный FPV.
Можно сидеть на стульчике с аппаратурой в руках и в шлеме, и при этом где-то кататься :-)









Щас такое время, что роботу положено иметь военную лычку.
В общем - присваиваю ему звание НРК (UGW).
А ещё - мне уже давно хотелось, чтобы он быстро включался :-)
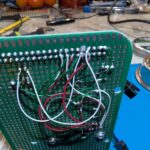
Поэтому старые мозги робота (Raspberry Pi 4) были вынуты, а новые (ESP32) - засунуты.
Благодаря технолоджиям в виде Copilot (и немного chatgpt/gemini) - код был транслирован с питона на c++
Замена мозгов дала нифиговый буст инициализации робота.
Вместо ~минуты на малинке (из-за загрузки ОС), старт на есп32 занимает секунду!
С учётом того, что это уже 4я версия, но ещё далёкая от идеала - буду пока звать его как-то так:
НРК Loop v0.4.0 / UGW Loop v0.4.0




Теперь уже:
Подумал, и решил, что надо его как-то назвать, чтобы название отображало его сущность - бесконечно разрабатываемого и улучшаемого проекта.
Из вариантов придуманных названий - e∞dless или l∞p
А версия будет обозначаться как ∞.x.y



















И всякое полезное, которое смоделилось/напечаталось в первые месяцы











Получился очень странный дрон. Не пойму как заставить его летать :-/









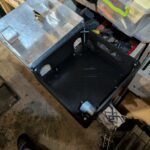
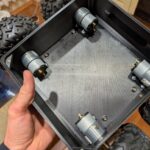
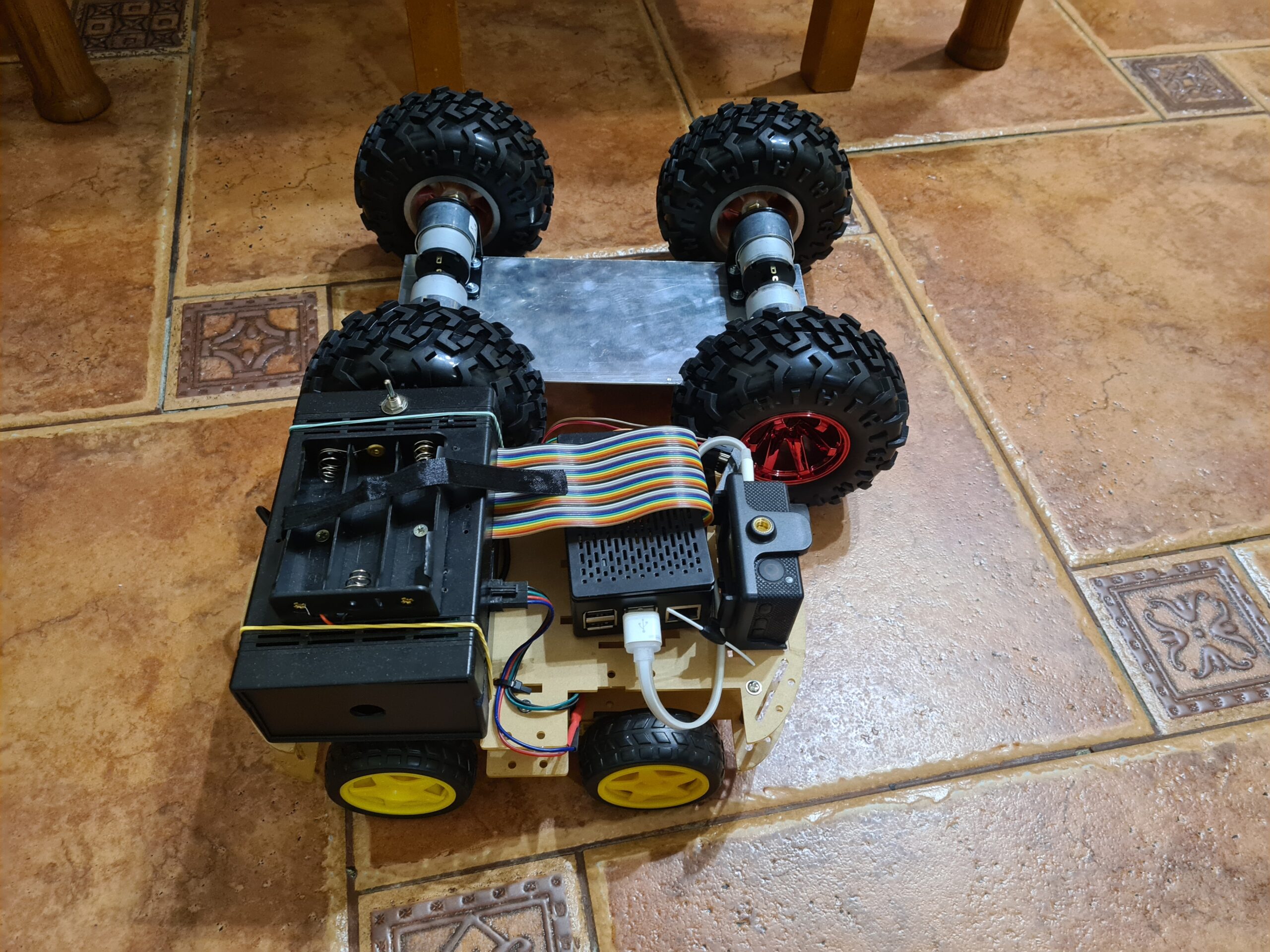
Для создания второй версии домашнего колёсного робота - использовал двигатели, колёса, кронштейны и переходные втулки с алишки.
(Первая версия - была основана на шасси "сделай сам" из оргстекла, и не особо могла похвастаться прочностью и проходимостью)
Немного фоточек:




Мотогарнитура Freedconn Colo - топ за свои деньги.
Музыку играет, водонепроницаемостью обладает (но не возле разъёма, если что), батарею долго держит.
Но в какой-то момент разъем стал плохо контачить, и собеседник переставал меня слышать. Скорее всего это связано с тем что я частенько ударял по разъему, либо задевал его рукой.
Новую гарнитурку покупать какбэ дорого, так что решил перепаять разъем.
Он гуглится по названию 8 pin UC-E6 mini usb.
Есть на Aliexpress (ссылки будут внизу поста).
Кабель удлиннил - отрезал кусок от старого дата-кабеля к телефону Sony Ericsson, там как раз 6 проводов внутри было. Но можно обойтись и каким-нить USB кабелем на 4 провода, сделав наушники монофоническими.
Полярность подключения - определял мультиметром. Каналы - методом тыка, и в итоге перепутал :-) Но для музыки и голоса это не критично.
Распиновка следующая:

| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | ph1-1 | Headphone 1 |
| 2 | ph1-2 | Headphone 1 |
| 3 | ph2-1 | Headphone 2 |
| 4 | ph2-2 | Headphone 2 |
| 5 | mic1-1 | Microphone |
| 6 | mic1-2 | Microphone |
| 7 | - | - |
| 8 | - | - |
Шнурок со штекером теперь выглядит как-то так:


Ссылки на разъёмы (оставлю несколько, на случай если товары пропадут у некоторых продавцов):
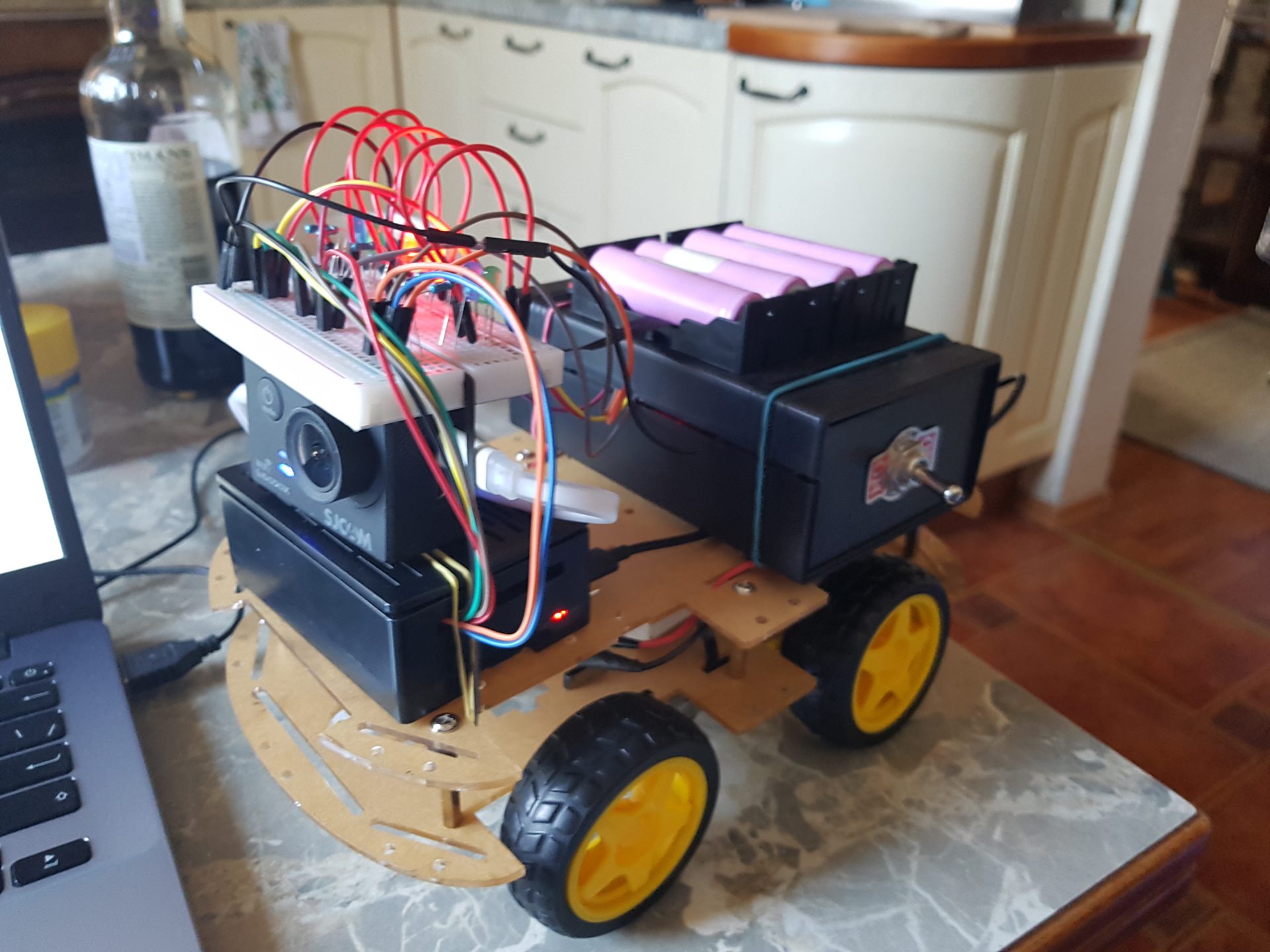
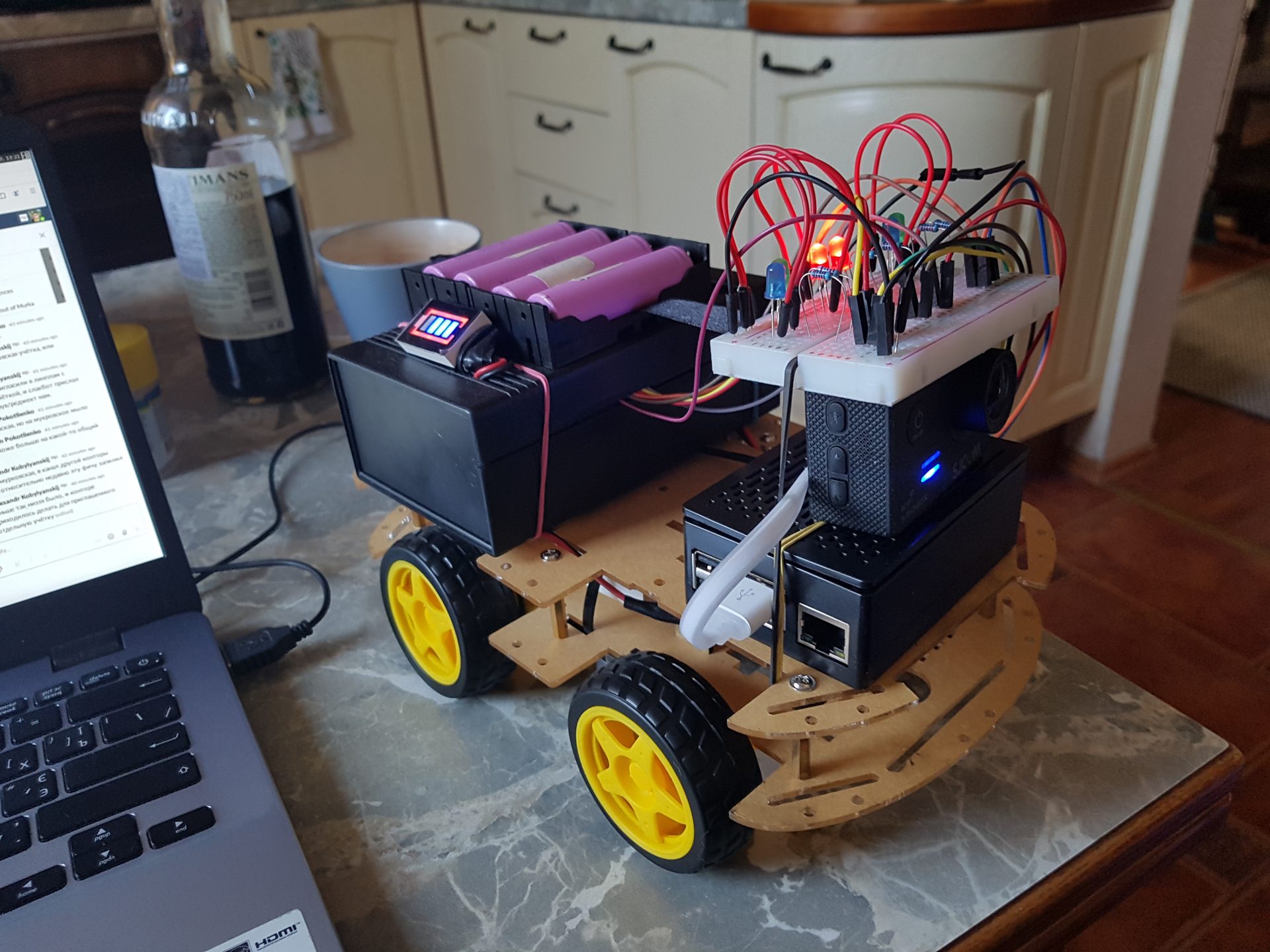
Штош, спустя 8 лет - хотелка построить некоторое робо-шасси таки свершилась: в конце 2020 года я собрал себе робота.
И не на старой материнке x86, а на RaspberryPi.
И без кастомного шасси, а на китайском шасси из оргстекла и движочками.
Технологии стали доступней, ну и появились ресурсы для их покупки :-)
Зайчатки роботостроения 8-летней давности храню тут, для усугубления приступов ностальгии (перенёс со старого адреса gromozeka.pp.ua): http://robot.timba.name
Управление через ssh, при помощи скриптика на петоне, камера - старенький SJCAM 5000X Elite (сначала пробовал с дешманской веб-камерой от logitech, но китайская гопрошка оказалась лучке как в качестве картинки, так и в угле обзора).
Роботу-ебоботу нашлось применения в хозяйстве: на зиму мы закрываем дверь в прихожую, пушо там стоит газовый котёл и для его работы нужна вентиляция, а из-за вентиляции, при открытой двери - холодно.
Но кот не приемлет закрытые двери и шкрябает её.
Собсно когда сидишь и работаешь - отходить на каждое шкрябанье времени нет, и гораздо проще оказалось гонять кота роботом, зайдя в консольку, висящую на отдельном рабочем столе, и ждущую команд.
Из хотелок - было бы прикольно поиграться с OpenCV (например чтобы робот распознавал кота и сам отгонял его от двери), и пересесть на взрослое шасси (пушо китайское из оргстекла - слишком нэжное, и от него то и дело отламываются кусочки), например на такое: Dagu Wild Thumper 6WD All-Terrain Chassis






Флюс-паста и паяльник с регулятором температуры - это заебись.
С детства паял ебучей канифолью (пушо она была самым дешевым флюсом). И обычным паяльником на 60ВТ.
Канифоль заставляла меня и окружающих страдать. Меня - потому что была не самым лучшим решением (но я тогда этого не знал), окружающих - потому что воняла.
А теперь у меня наконец есть кучка ништяков от Pro'sKit, которые каждый раз радуют меня своей работой.

